


Ferngesteuerte Roboter übernehmen zunehmend Aufgaben in Notfällen, wie beispielsweise die Suche nach Überlebenden eingestürzter Gebäude.

Die Erkennung potenziell gefährlicher Stoffe, Geiselnahmen sowie andere Maßnahmen der Strafverfolgung und Terrorismusbekämpfung. Diese spezielle ferngesteuerte Ausrüstung nutzt hochpräzise Mikromotoren anstelle von menschlichen Arbeitskräften, um die notwendigen gefährlichen Operationen durchzuführen und so das Risiko für das beteiligte Personal deutlich zu reduzieren. Präzise Handhabung und präziser Werkzeugeinsatz sind zwei wichtige Voraussetzungen.
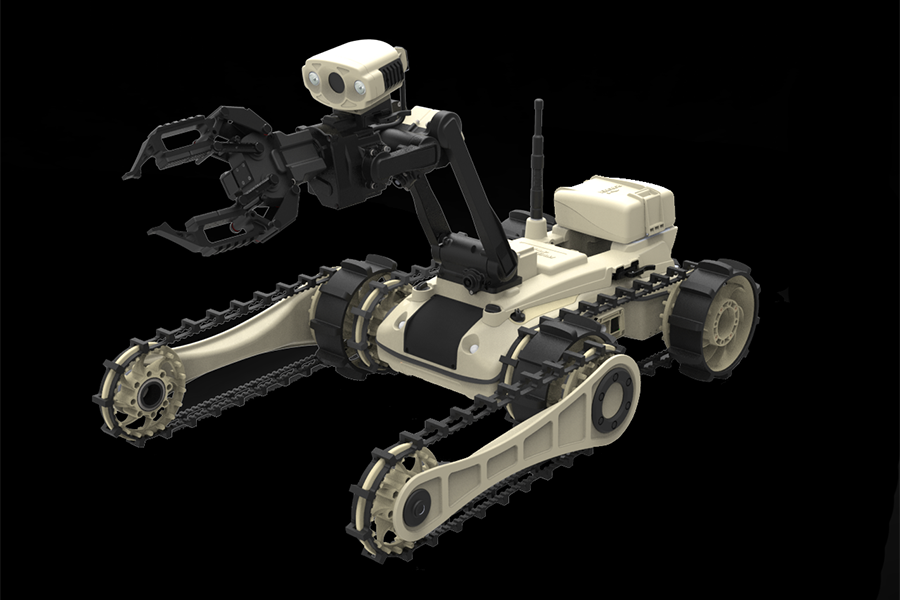
Mit der ständigen Weiterentwicklung der Technologie können Roboter immer komplexere und anspruchsvollere Aufgaben übernehmen. Daher werden sie zunehmend in Notfällen eingesetzt, die für Menschen zu gefährlich sind – beispielsweise in der Industrie, bei der Polizei oder im Kampf gegen den Terrorismus, etwa zur Identifizierung verdächtiger Gegenstände oder zur Bombenentschärfung. Aufgrund dieser extremen Bedingungen müssen diese Roboterfahrzeuge so kompakt wie möglich sein, um die spezifischen Anforderungen zu erfüllen. Ihre Greifarme müssen flexible Bewegungsmuster ermöglichen und gleichzeitig die nötige Präzision und Kraft für vielfältige Aufgaben bieten. Auch der Energieverbrauch spielt eine entscheidende Rolle: Je effizienter der Antrieb, desto länger die Akkulaufzeit. Spezielle Hochleistungsmikromotoren sind daher ein wichtiger Bestandteil ferngesteuerter Roboter und erfüllen diese Anforderungen optimal.
Dies gilt auch für kompaktere Aufklärungsroboter.

Diese Fahrzeuge sind mit Kameras ausgestattet und werden mitunter sogar direkt am Einsatzort abgesetzt. Daher müssen sie Stößen, Vibrationen, Staub und Hitze in potenziell gefährlichen Gebieten standhalten. In solchen Fällen kann kein Mensch direkt nach Überlebenden suchen. Unerfahrene Bodenfahrzeuge (UGVs) leisten hier Abhilfe. Dank des FAULHABER-Gleichstrom-Mikromotors in Kombination mit einem Planetengetriebe zur Drehmomentsteigerung sind sie äußerst zuverlässig. Die geringe Größe der UGVs ermöglicht die risikofreie Suche in eingestürzten Gebäuden und die Übertragung von Echtzeitbildern. Dadurch sind sie ein wichtiges Entscheidungsinstrument für Einsatzkräfte bei taktischen Maßnahmen.
Der Gleichstrom-Präzisionsmotor und das Getriebe bilden eine kompakte Antriebseinheit, die sich für vielfältige Antriebsaufgaben eignet. Diese Roboter sind robust, zuverlässig und kostengünstig.
Heutzutage werden mobile Roboter häufig in kritischen Situationen eingesetzt, in denen ein erhebliches Risiko für Menschen besteht, sowie in Teilen der industriellen Produktion.

Bei Maßnahmen der Strafverfolgung oder Terrorismusbekämpfung, wie der Identifizierung verdächtiger Gegenstände oder der Entschärfung von Bomben, müssen diese „Fahrzeugbediener“ in solchen Extremsituationen spezielle Anforderungen erfüllen. Präzise Manipulation und präziser Werkzeughandling sind zwei Grundvoraussetzungen. Selbstverständlich muss das Gerät auch so klein wie möglich sein, um durch enge Durchgänge zu passen. Die von solchen Robotern verwendeten Aktuatoren sind daher bemerkenswert. Spezielle Hochleistungsmikromotoren sind zu einer wichtigen Komponente geworden.

Allerdings ist das Anheben von 30 kg am Ende des Arms bereits eine ziemliche Herausforderung.
Gleichzeitig erfordern bestimmte Aufgaben Präzision statt Kraftaufwand. Zudem ist der Platz für die Armbaugruppe sehr begrenzt. Daher sind leichte und kompakte Aktuatoren für Greifer unerlässlich. Um diese anspruchsvollen Anforderungen zu erfüllen, muss der Greifer um 360 Grad drehbar sein und gleichzeitig die erforderliche Genauigkeit und Leistungsfähigkeit für die Ausführung verschiedenster Aufgaben bieten.
Der Stromverbrauch spielt bei batteriebetriebenen Geräten eine entscheidende Rolle. Je höher der Wirkungsgrad, desto länger die Betriebsdauer. Das Antriebsproblem wird durch einen Gleichstrom-Mikromotor mit Planetengetriebe und Bremsen gelöst. Der Motor der Serie 3557 leistet bis zu 26 W bei einer Nennspannung von 6–48 V und erhöht zusammen mit dem voreingestellten Getriebe der Serie 38/2 die Antriebskraft auf 10 Nm. Die Ganzmetallgetriebe sind nicht nur robust, sondern auch unempfindlich gegenüber kurzzeitigen Lastspitzen. Die Untersetzungsverhältnisse sind von 3,7:1 bis 1526:1 wählbar. Das kompakte Motorgetriebe ist im oberen Bereich des Manipulators platzsparend angeordnet. Die integrierte Bremse gewährleistet die Endposition bei Stromausfall. Zudem sind die kompakten Komponenten wartungsfreundlich und defekte Teile lassen sich schnell austauschen. Ein weiterer wichtiger Vorteil: Leistungsstarke Gleichstrom-Bürstenmotoren benötigen lediglich eine einfache Strombegrenzung. Die Stromstärke wird über Gegendruck an den Fernbedienungshebel zurückgemeldet und vermittelt dem Bediener ein Gefühl für die benötigte Kraft zum Betätigen des Greifers. Die kompakte Antriebseinheit besteht aus einem präzisen Gleichstrommotor und einem Stellgetriebe. Sie eignet sich für vielfältige Antriebsaufgaben und ist leistungsstark, zuverlässig und kostengünstig. Die einfache Bedienung des Standardmotors erfüllt die Anforderungen an einen kostengünstigen, schnellen und zuverlässigen Antrieb.